09. Longitudinal Control Loops
Longitudinal Autopilot
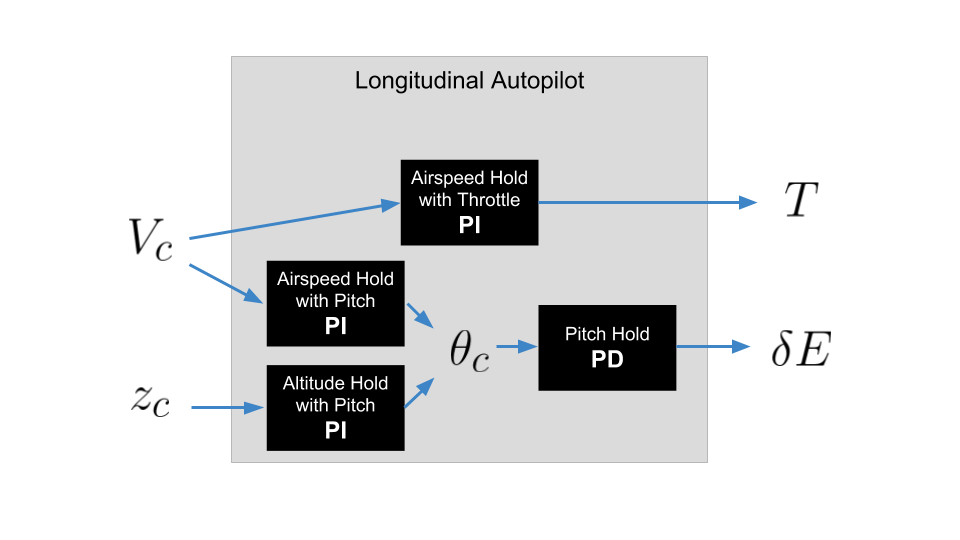
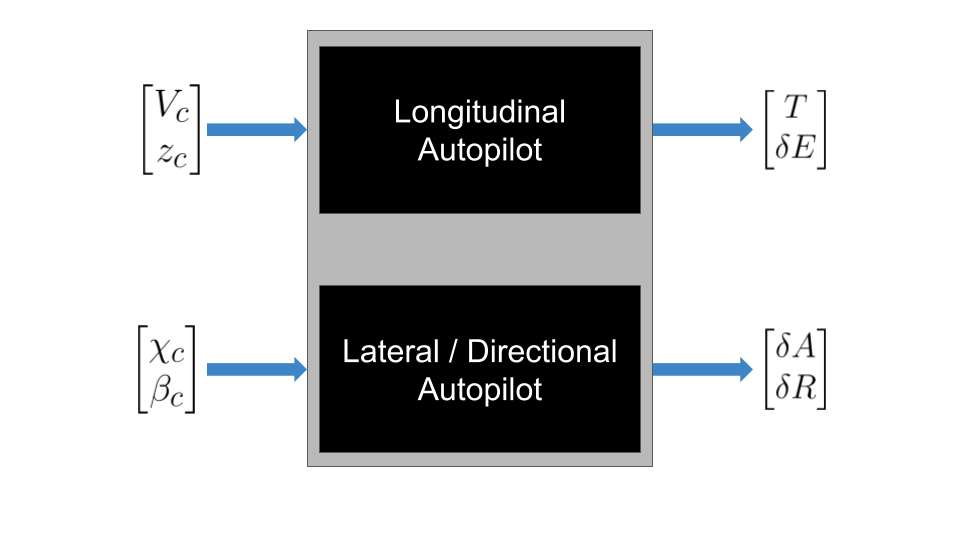
The job of the longitudinal autopilot is to use the throttle, T , and elevator deflection, \delta E , to control the airspeed, V , and altitude, z (or sometimes h ).
But there's some redundancy here, since the throttle and the elevator deflection can influence both the airspeed and altitude. We resolve this redundancy by dividing flight into four "zones":
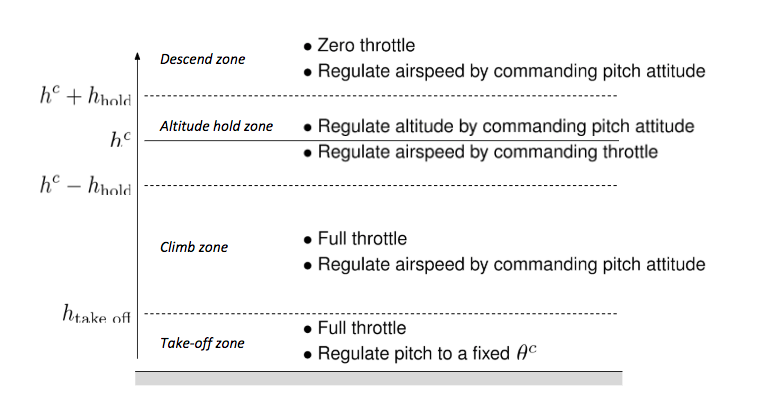
We can model this as a state machine, where transitions between states happen when the vehicle crosses between zone boundaries.
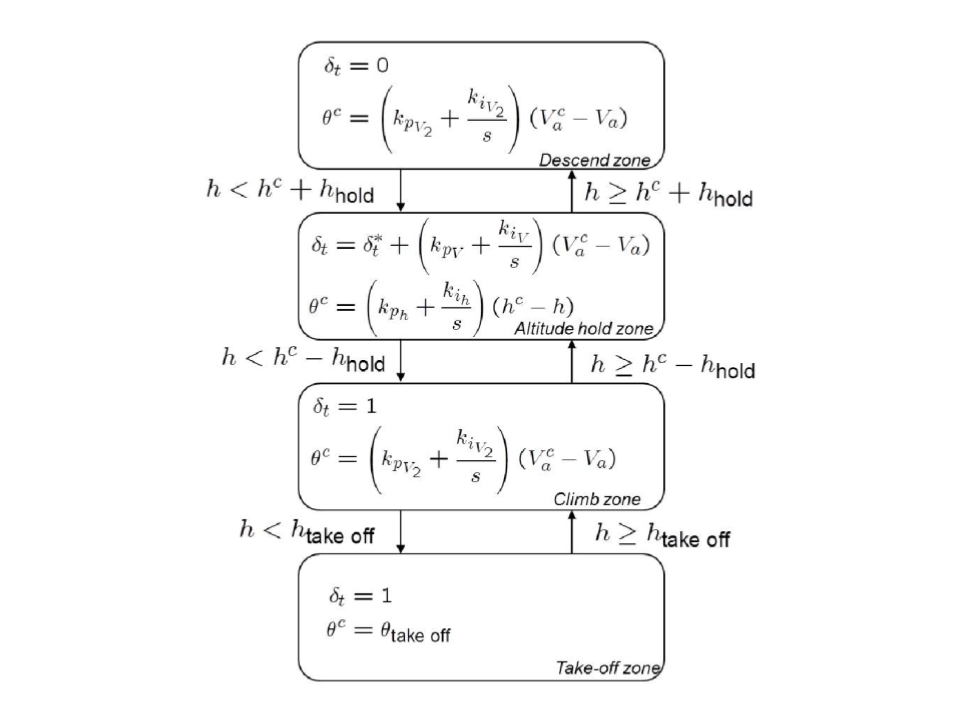
Note that this diagram uses \delta t instead of T for thrust. The \delta t ^ * that you see in the second box is a feed-forward value for the thrust based on trim calculations (which you learned how to do in a previous lesson).
These four zones require four separate control loops (though there isn't an exact 1 to 1 mapping between zones and control loops). You can see these loops in the diagram below.